
Page 125 - 《橡塑技术与装备》2024年1期
P. 125
设备管理与维护 陈雅丽 等·注塑机垫脚的改良方向
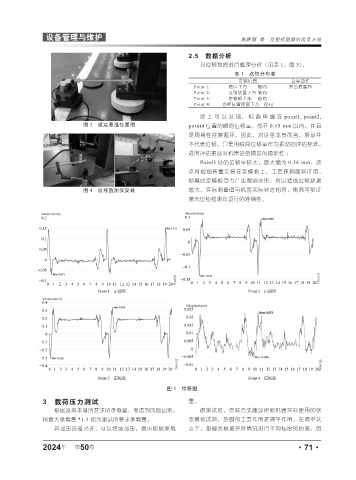
2.5 数据分析
对位移数据进行整理分析(见表 1,图 5)。
表 1 点位分布表
安装位置 设备动作
Point 1: 模区下方 轴向 开合模循环
Point 2: 注射装置下方 轴向
Point 3: 定模板上部 轴向
Point 4: 合模装置尾部下方 径向
综上可 以发现, 机器垫脚 在 point1, point2,
图 3 设定基准位置图 point4 位置的瞬间位移量,都在 0.15 mm 以内,并且
是周期性往复循环。因此,对设备本身而言,振动并
不代表位移,只是用瞬间位移量作为振动的评估标准,
进而评估振动对机器设备精度的稳定性 ;
Point3 处的位移量较大,最大值为 0.34 mm,该
点将检测装置安装在定模板上,主要做侧面验证用。
锁模后定模板受力产生微弱变形,所以造成位移数据
图 4 位移监测仪安装 增大,实际测量值与机器实际状态相符,侧面可验证
激光位移检测仪运行的准确性。
图 5 位移图
3 载荷压力测试 量。
根据设备本身所要求的承载量,考虑到风险因素, 做测试时,安装方式建议按照机器实际使用的状
将最大承载量 *1.3 即为测试所要求承载量。 态模拟试验,垫脚的主要作用是调平作用,在调平状
若加压设备允许,可以持续加压,得出极限承载 态下,垫脚会根据实际情况进行不同程度的抬高,因
年
2024 第 50 卷 ·71·