
Page 50 - 《橡塑技术与装备》2024年5期
P. 50
橡塑技术与装备 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
行模型计算和分析。在监督学习模型中,我们有位置 的值的形式表示,我们将相关数据存储在数据集中,
输入数据和相应的位置标签,通过观察位置输入数据 形成数据集,包含特征和标签的各个数据示例。示例
和位置标签之间的关系来学习如何进行预测,并通过 可以看作电子表格中的某一行,特征是受监督模型用
调整各项参数或权重来优化模型,使得模型的预测结 于预测标签的值 ;标签是 “ 答案 ”,即我们希望模型
果与标签之间的误差最小化。 预测的值。在预测人员位置的人员定位模型中,特征
(1)建立数据集 可以是定位类型、纬度、经度、企业、装置 / 罐区 / 辅
数据是机器学习的驱动力,数据以存储在表中的 助装置等 ;标签是位置信息。示例如表 1。
字词、数字、图片或者音频文件中捕获的像素和波形
表 1 数据集
特征 标签
数据 定位方式 经度 纬度 企业 装置 / 罐区 辅助装备 其他 位置
数据 _01 北斗 经度 _01 纬度 _01 企业 _01 D Y 屏蔽装置 位置 _01
数据 _02 北斗 经度 _02 纬度 _02 企业 _02 D N / 位置 _02
数据 _03 北斗 经度 _03 纬度 _03 企业 _01 T N / 位置 _03
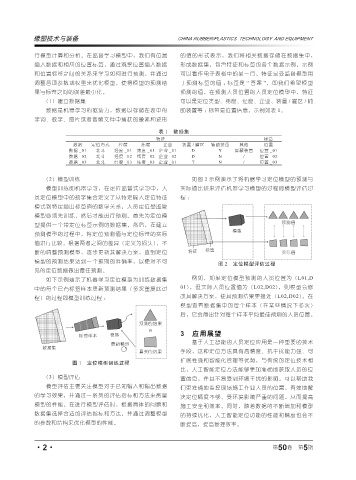
(2)模型训练 如图 2 示例演示了将机器学习定位模型的预测与
模型训练即机器学习,在定位监督式学习中,人 实际值比较来评估机器学习模型的过程即模型评估过
员定位模型中的数字集合定义了从特定输入定位特征 程:
模式到特定输出标签值的数学关系,人员定位受监管
模型必须先训练,然后才能进行预测。首先为定位模
型提供一个带定位标签示例的数据集。然后,在建立
预测模型的过程中,将定位预测值与定位标签的实际
值进行比较,根据两者之间的差异(定义为损失),不
断的调整预测模型,逐步更新其解决方案,直到定位
模型的预测结果达到一个预期的准确率,以便对不可
图 2 定位模型评估过程
见的定位数据做出最佳预测。
例如,如果定位模型预测的人员位置为(L01,D
如下示例演示了机器学习定位模型为训练数据集
中的每个已有标签样本更新预测结果(多次重复此过 01),但实际人员位置值为(L02,D02),则模型会修
程)的过程即模型训练过程 : 改其解决方案,使其预测结果更接近(L02,D02)。在
模型查看数据集中的每个样本(在某些情况下多次)
后,它会得出针对每个样本平均最佳预测的人员位置。
3 应用展望
基于人工智能的人员定位应用是一种重要的技术
手段,这种定位方法具有高精度、抗干扰能力强、可
扩展性强和智能化管理等优势,与传统的定位技术相
图 1 定位模型训练过程
比,人工智能定位方法能够更加准确地获取人员的位
(3)模型评估 置信息,并且不易受到环境干扰的影响。可以帮助我
模型评估主要关注模型对于已知输入和输出数据 们更准确地监控现场施工作业人员的位置,有效地解
的学习效果,并通过一系列的评估指标和方法来衡量 决定位精度不够、受环境影响严重的问题,从而提高
模型的性能。在进行模型评估时,根据具体的问题和 施工安全和效率。同时,随着数据的不断增加和模型
数据集选择合适的评估指标和方法,并通过调整模型 的持续优化,人工智能定位功能的性能和精度也会不
的参数和结构来优化模型的性能。 断提高,提高管理效率。
5
·2· 第 50 卷 第 期