
Page 89 - 《橡塑技术与装备》2024年6期
P. 89
工艺与设备 徐兴国 等·轮胎动平衡检测设备的技术方案
测轮胎某一位置的振幅到达最大值时,观察施加激振 分是圆频率 p d 的衰减运动,第二部分是圆频率为 ω 的
力频率的数值。通过频率的数值来判断轮胎是否达到 受迫振动。由于阻尼的存在,衰减振动的部分经过一
动平衡状态。 定的时间后会消失。在此之后是稳定的受迫振动。只
要激振力继续存在,它就会以激振力的频率进行下去,
2 计算 不会衰减。
2.1 理论计算 这种振幅随时间无限延长的振动称为共振。(共振
2.1.1 强迫振动 的前提是激振力的频率等于振动系统固有频率)瞬态
当在系统上施加激振力(简谐载荷)或者激振位 解成为 [2] :
移(简谐位移)等外部激励时。系统产生持续振动, F s t
x= cosωnt
这类在外部激励作用下所产生的振动称为受迫振动。 2mω n
2.1.2 固有频率
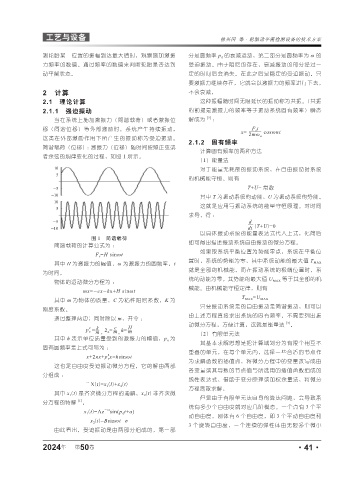
简谐载荷(位移):激振力(位移)随时间按照正弦或
计算固有频率的两种方法
者余弦的规律变化的过程,如图 1 所示。
(1)能量法
对于能量无耗散的振动系统,在自由振动时系统
的机械能守恒。则有
T+U= 常数
其中 T 为振动系统的动能,U 为振动系统的势能。
这就是应用与振动系统的能量守恒原理。对时间
求导,得 :
d
dt (T+U)=0
以具体振动系统的能量表达式代入上式,化简后
图 1 简谐载荷
即可得出描述振动系统自由振动的微分方程。
简谐载荷的计算公式为 :
F s =H sinωt 如果取系统平衡位置为势能零点,系统在平衡位
其中 H 为激振力的幅值,ω 为激振力的圆频率,t 置时,系统的势能为零,其中系统动能的最大值 T MAX
就是全部的机械能,而在振动系统的极端位置时,系
为时间。
统的动能为零,其势能的最大值 U MAX 等于其全部的机
物体的运动微分方程为 :
mx=-cx-kx+H sinωt 械能。由机械能守恒定律,则有
其中 m 为物体的质量,C 为粘性阻尼系数,K 为 T MAX =U MAX
只要振动系统是的自由振动是简谐振动,则可以
刚度系数。
由上述方程直接求出系统的固有频率。不需要列出振
通过整理两边,同时除以 m,并令 : [3]
2 2 n = c h= H 动微分方程,方便计算,这就是能量法 。
p n , m , m (2)有限单元法
其中 h 表示单位质量受到的激振力的幅值,p n 为
其基本求解思想是把计算域划分为有限个相互不
固有圆频率是上式可写为 :
重叠的单元,在每个单元内,选择一些合适的节点作
2
x+2nx+p n x=hsinωt
为求解函数的插值点,将微分方程中的变量改写成由
这也是自由度受迫振动微分方程,它的解由两部
各变量或其导数的节点值与所选用的插值函数组成的
分组成 :
线性表达式,借助于变分原理或加权余量法,将微分
X(t)=x 1 (t)+x 2 (t)
方程离散求解,
其中 x 1 (t) 是齐次微分方程的通解,x 2 (t) 非齐次微
但是由于有限单元法自身的算法问题,会导致系
分方程的特解 [1] 。
统有多少个自由度就对应几阶模态。一个点有 3 个平
x 1 (t)=Ae -nt sin(p d t+a)
动自由度,刚体有 6 个自由度,即 3 个平动自由度和
x 2 (t)=Bsinωt-σ
3 个旋转自由度,一个连续的弹性体由无限多个微小
由此看出,受迫振动是由两部分组成的,第一部
年
2024 第 50 卷 ·41·